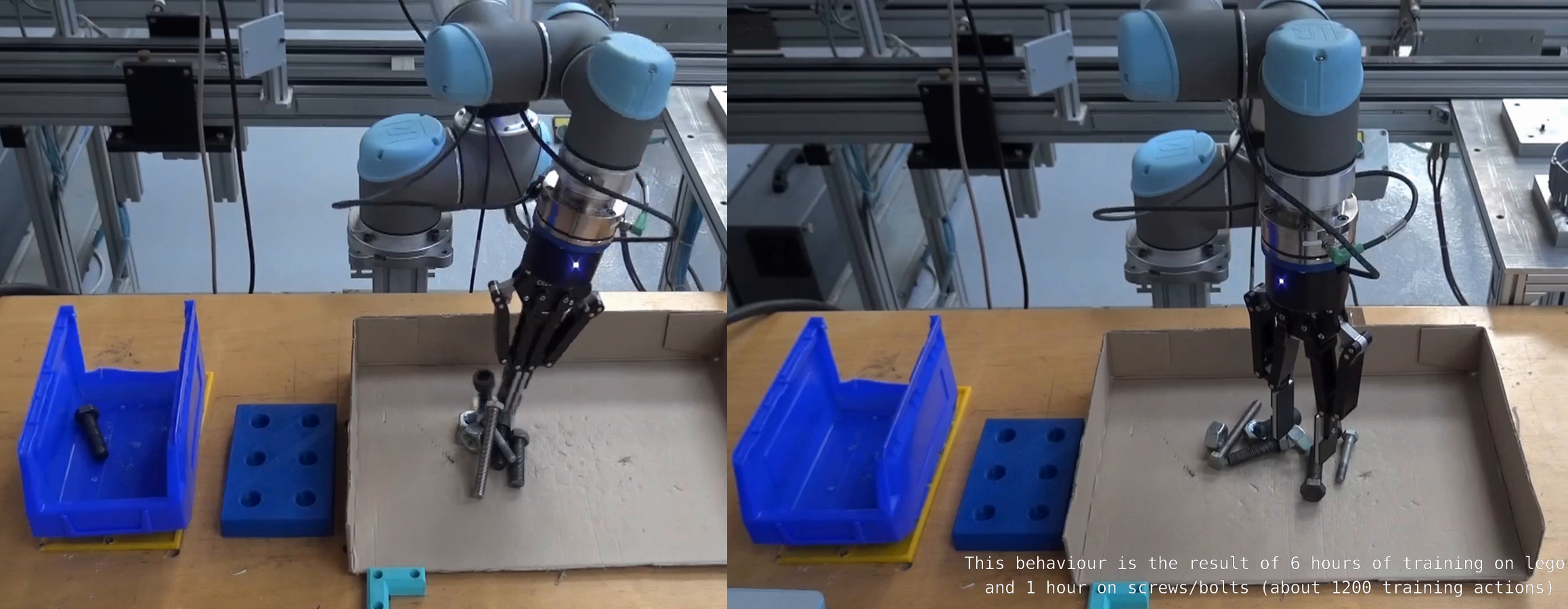
Apprendre les synergies entre saisir et pousser de manière autonome
Avec Laurent Bimont, Stéphane Thiery, Éric Nyiri et Olivier Gibaru. Adaptation d’un article de recherche Zeng and al., 2018
Apprentissage par renforcement
Préhension sans CAO
Apprentissage profond
Robots collaboratifs industriels
Python
Tensorflow
Keras
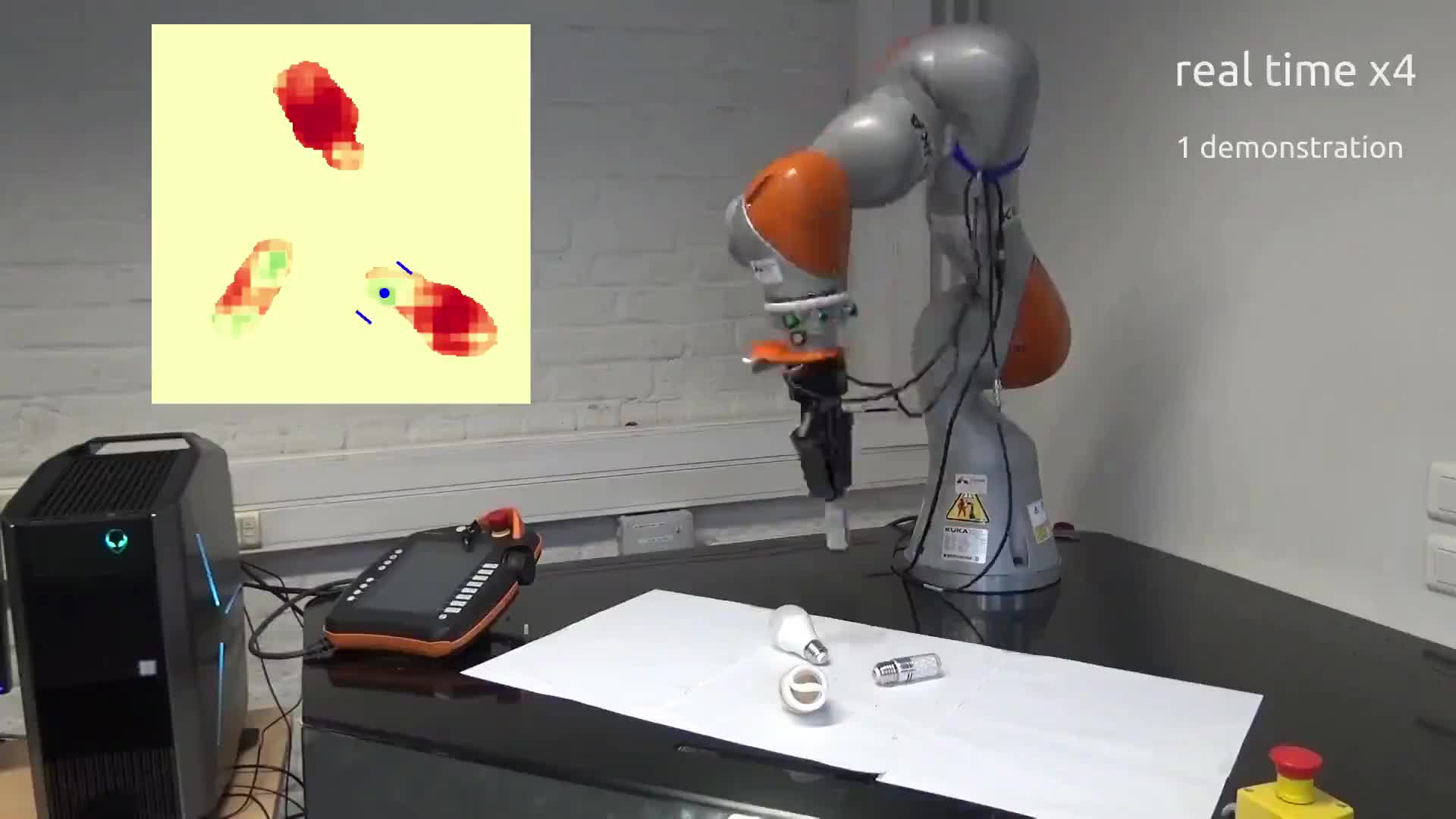
Apprentissage de la préhension en montrant des zones autorisées et interdites
Avec Laurent Bimont, Stéphane Thiery, Éric Nyiri et Olivier Gibaru
Apprentissage d'affordance de préhension
Robots collaboratifs industriels
Préhension sans CAO
Apprentissage profond
Python
Tensorflow
Keras

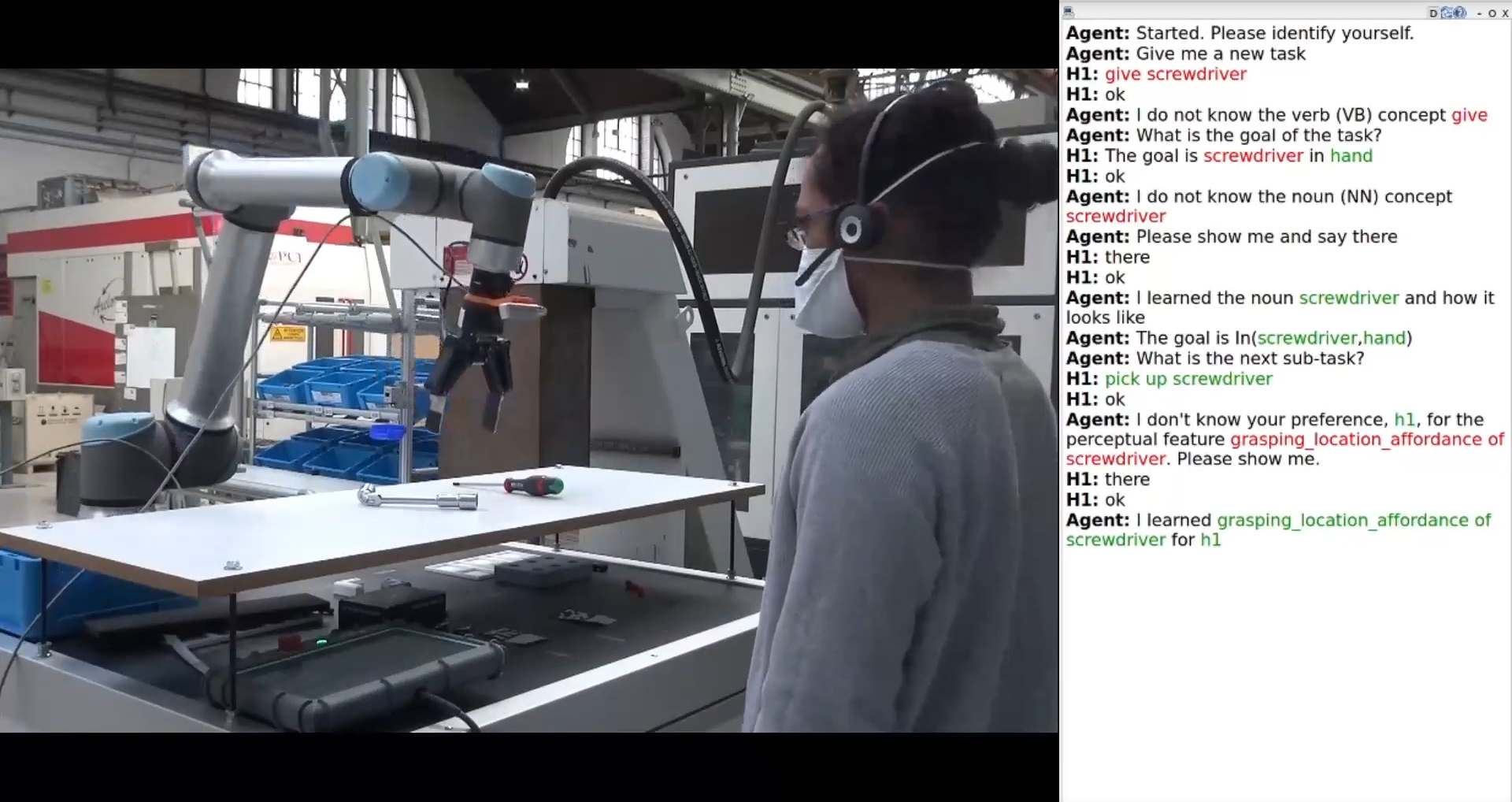
Architecture cognitive pour la robotique
Avec Stéphane Thiery, Éric Nyiri et Olivier Gibaru.
Architecture cognitive
Architecture hybride
Arbre de comportements
Interaction homme/robot
Apprentissage de tâches
ROS
Python
Adaptation aux préférences
Joint work with Stéphane Thiery, Éric Nyiri and Olivier Gibaru.
Architecture cognitive
Architecture hybride
Arbre de comportements
Interaction homme/robot
Apprentissage de tâches
Préférences
ROS
Python