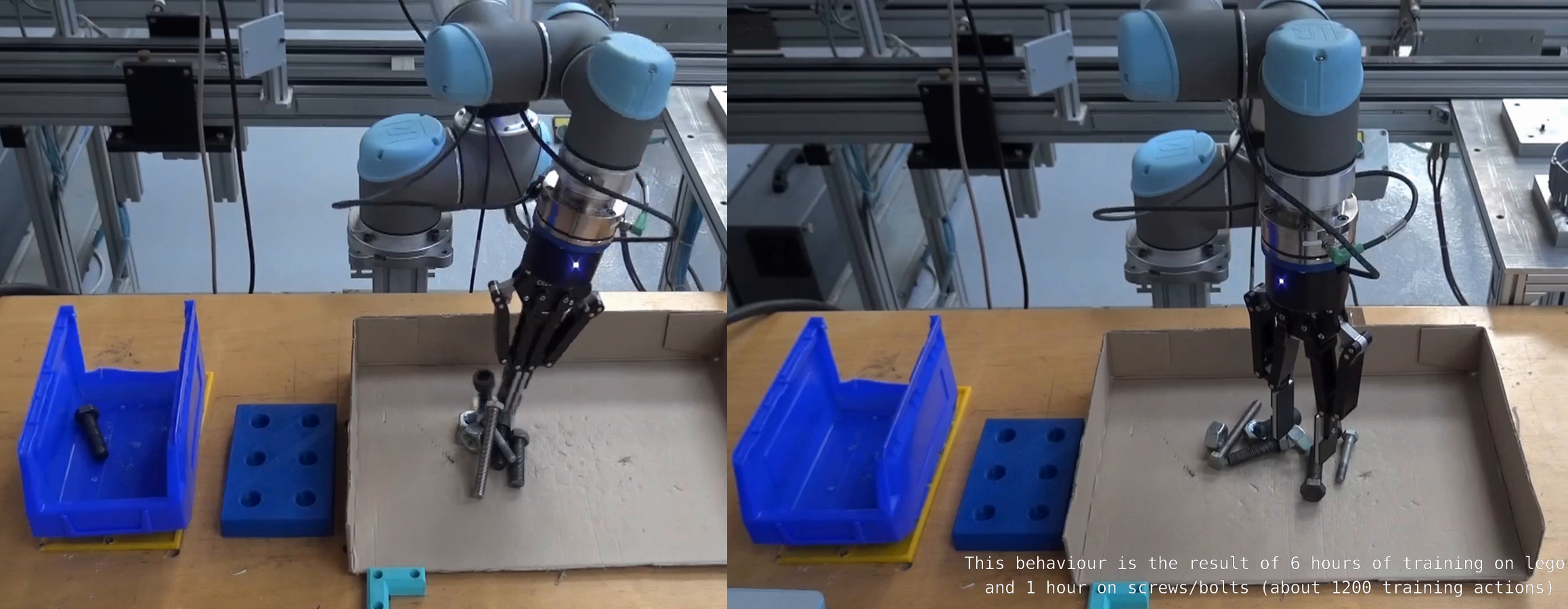
Learning synergies between grasping and pushing in an autonomous way
Joint work with Laurent Bimont, Stéphane Thiery, Éric Nyiri and Olivier Gibaru. Adaptation of a research paper from Zeng and al., 2018
Reinforcement Learning
CAD-free grasping
Deep Learning
Industrial collaborative robots
Python
Tensorflow
Keras
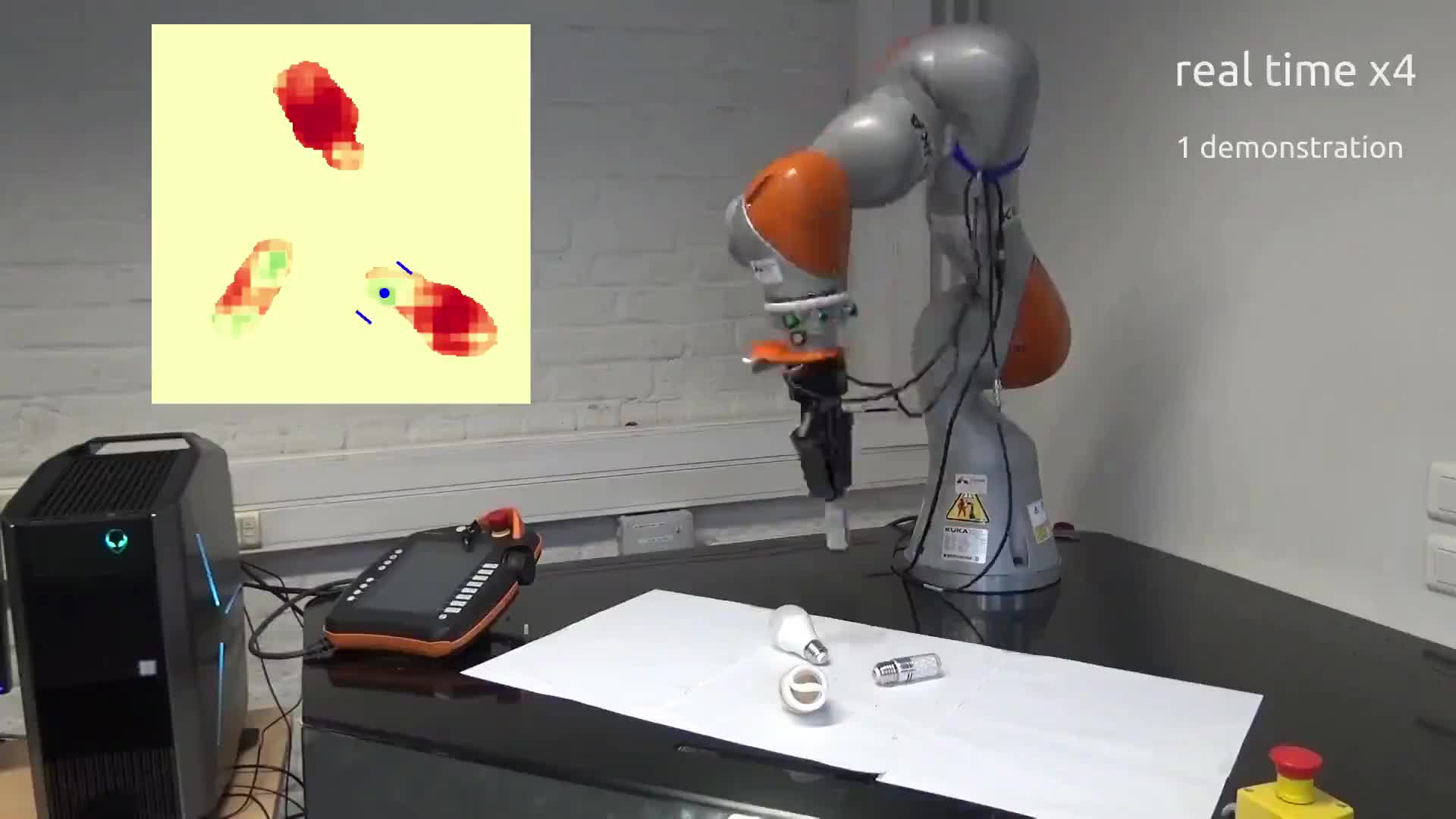
Learning grasping from authorised and prohibited demonstrations
Joint work with Laurent Bimont, Stéphane Thiery, Éric Nyiri and Olivier Gibaru
Learning from Demonstrations
Affordance learning
Industrial collaborative robots
CAD-free grasping
Deep Learning
Python
Tensorflow
Keras

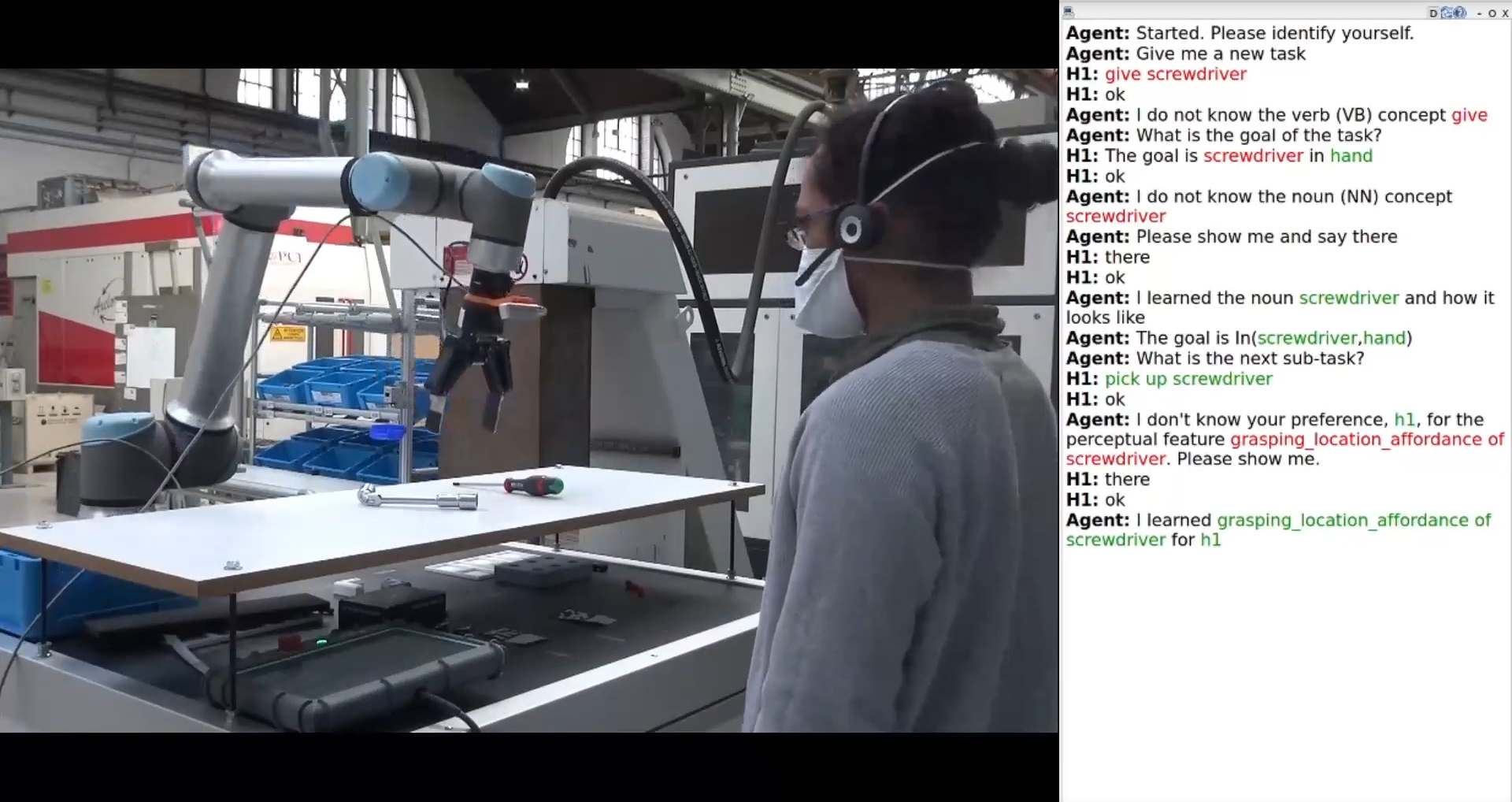
Cognitive and robotic architecture
Joint work with Stéphane Thiery, Éric Nyiri and Olivier Gibaru.
Cognitive architecture
Hybrid architecture
Behavior tree
Human/robot interaction
Task learning
ROS
Python
Adaptation to some human preferences
Joint work with Stéphane Thiery, Éric Nyiri and Olivier Gibaru.
Cognitive architecture
Hybrid architecture
Behavior tree
Human/robot interaction
Human preferences
Task learning
ROS
Python